26 KiB
coming soon
介绍
在这个项目中,你将编写简单的 Python 函数,生成描述 Pacman 物理状态(记为 pacphysics)的逻辑句子。然后,你将使用 SAT 求解器 pycosat,解决与 规划(生成动作序列以到达目标位置并吃掉所有点)、定位(根据本地传感器模型在地图中找到自己)、建图(从零开始构建地图)以及 SLAM(同时定位与建图)相关的逻辑推理任务。
你需要补全的代码文件有:
logicPlan.py
你可以阅读并参考来帮助你实现代码的文件有:
logic.pylogicAgents.py:以逻辑规划形式定义了Pacman在本项目中将遇到的两个具体问题。game.py:Pacman世界的内部模拟器代码。你可能需要查看的是其中的Grid类。
你可以忽略其他支持文件。
The Expr Class
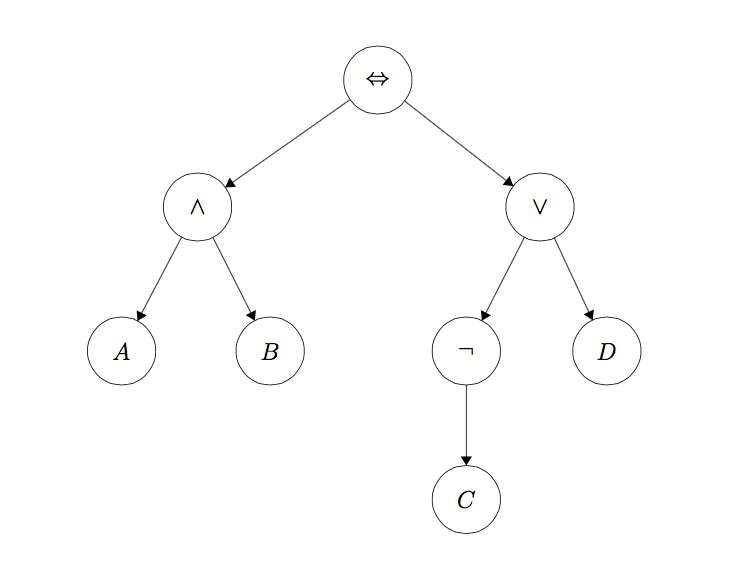
在本项目的第一部分,你将使用 logic.py 中定义的 Expr 类来构建命题逻辑句子。一个 Expr 对象被实现为一棵树,每个节点是逻辑运算符 (\vee, \wedge, \neg, \to, \leftrightarrow ) ,叶子节点是文字(A, B, C, D)。以下是一个句子及其表示的示例:
(A \wedge B) \leftrightarrow (\neg C \vee D)
要实例化名为 'A' 的符号,请像这样调用构造函数:
A = Expr('A')
该 Expr 类允许你使用 Python 运算符来构建这些表达式。以下是可用的 Python 运算符及其含义:
~A:\neg AA & B:A \wedge BA | B:A \vee BA >> B:A \to BA % B:A \leftrightarrow B
因此要构建表达式 $A \wedge B$,你可以这样做:
A = Expr('A')
B = Expr('B')
A_and_B = A & B
(请注意,该示例中赋值运算符左边 A 只是一个 Python 变量名,即 symbol1 = Expr('A') 也可以正常工作。)
关于 conjoin 和 disjoin:
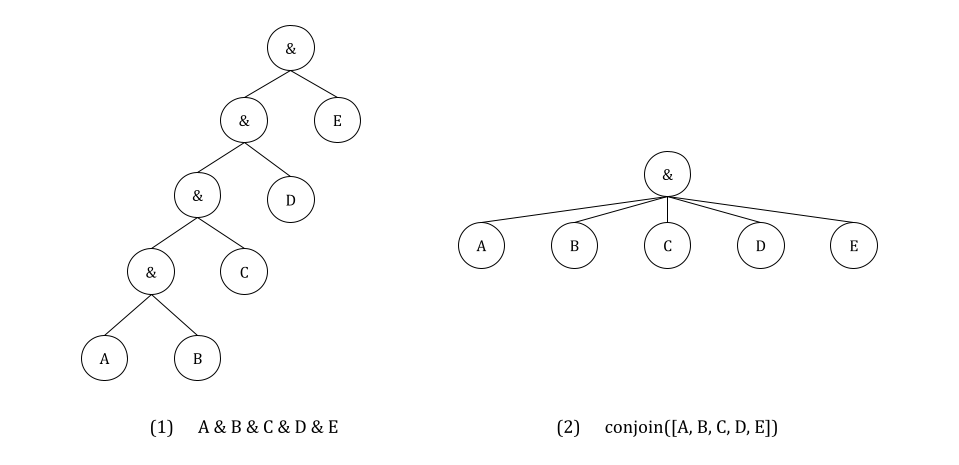
在可能的情况下,必须使用 conjoin 和 disjoin 操作符。conjoin 创建一个链式的 &(逻辑与)表达式,disjoin 创建一个链式的 |(逻辑或)表达式。假设你想检查条件 A、B、C、D 和 E 是否全部为真。简单的实现方法是写 condition = A & B & C & D & E,但这实际上会转换为 ((((A & B) & C) & D) & E),这会创建一个非常嵌套的逻辑树(见下图中的(1)),调试起来非常困难。相反,conjoin([A, B, C, D, E]) 可以创建一个扁平的树(见下图中的(2))。
命题符号命名(重要!)
在项目的后续部分,请使用以下变量命名规则:
- 引入变量时,必须以大写字母开头(包括
Expr)。 - 变量名中只能出现以下字符:
A-Z、a-z、0-9、_、^、[、]。 - 逻辑连接字符 (
&,|) 不得出现在变量名中。例如,Expr('A & B')是非法的,因为它试图创建一个名为'A & B'的常量符号。应使用Expr('A') & Expr('B')来创建逻辑表达式。
Pacphysics 符号
PropSymbolExpr(pacman_str, x, y, time=t):表示 Pacman 是否在时间t处于 (x,y),写作P[x,y]_t。PropSymbolExpr(wall_str, x, y):表示(x,y)处是否有墙,写作WALL[x,y]。PropSymbolExpr(action, time=t):表示 Pacman 是否在时间t采取action动作,其中action是DIRECTIONS的元素,例如North_t。- 一般情况下,
PropSymbolExpr(str, a1, a2, a3, a4, time=a5)创建表达式str[a1,a2,a3,a4]_a5,其中str是一个字符串。
logic.py 文件中有关于 Expr 类的更多详细文档。
SAT 求解器
一个SAT(可满足性)求解器接受编码世界规则的逻辑表达式,并返回一个满足该表达式的模型(逻辑符号的真值分配),如果存在这样的模型。为了高效地从表达式中找到可能的模型,我们利用 pycosat 模块,这是 picoSAT 库的Python包装器。
运行conda install pycosat 安装。
测试pycosat安装:
在 logic 目录下运行:
python pycosat_test.py
这应该输出:
[1, -2, -3, -4, 5]
如果你在环境设置过程中遇到问题,请告知我们。这对于完成项目至关重要,我们不希望你在安装过程中浪费时间。
Q1: Logic Warm-up
这个问题将让你练习使用项目中用于表示命题逻辑句子的 Expr 数据类型。你将在 logicPlan.py 中实现以下函数:
sentence1(): 创建一个Expr实例,表示以下三个句子为真的命题。不要进行任何逻辑简化,只需按此顺序将它们放入列表中,并返回列表的合取。列表中的每个元素应该对应这三个句子中的每一个:A \vee B, \neg A \leftrightarrow (\neg B \vee C), \neg A \vee \neg B \vee Csentence2(): 创建一个Expr实例,表示以下四个句子为真的命题。同样,不要进行任何逻辑简化,只需按此顺序将它们放入列表中,并返回列表的合取:C \leftrightarrow (B \vee D), A \to (\neg B \wedge \neg D), \neg(B \wedge \neg C) \to A, \neg D \to Csentence3(): 使用PropSymbolExpr构造函数,创建符号'PacmanAlive_0'、'PacmanAlive_1'、'PacmanBorn_0'和'PacmanKilled_0'(提示:回忆一下PropSymbolExpr(str, a1, a2, a3, a4, time=a5)创建的表达式是str[a1,a2,a3,a4]_a5,其中str是一个字符串;对于这个问题,你应该创建一些与这些字符串完全匹配的字符串)。然后,创建一个Expr实例,以命题逻辑的形式按顺序编码以下三个英文句子,而不进行任何简化:- 如果 Pacman 在时间 1 是活着的,当且仅当他在时间 0 是活着并且他在时间 0 没有被杀死,或者他在时间 0 不是活着的并且他在时间 0 出生。
- 在时间 0,Pacman 不能既是活着的又出生。
- Pacman 在时间 0 出生。
findModelUnderstandingCheck():- 查看
findModel(sentence)方法的工作原理:它使用to_cnf将输入句子转换为合取范式(SAT求解器所需的形式),并将其传递给SAT求解器以找到满足句子(sentence)中符号的赋值,即一个模型。模型是一个 表达式中符号 的字典,并对应有True或False的赋值。通过打开 Python 交互会话并运行from logicPlan import *和findModel(sentence1())及其他两个类似查询来测试。它们是否与预期一致? - 基于上述内容,填写
findModelUnderstandingCheck使它返回在如果允许使用小写变量时,findModel(Expr('a'))应该会返回的结果(由于不允许使用小写变量,直接调用会报错)。不应使用findModel或Expr其他超出函数中已有的内容;只需直接重建输出。
- 查看
entails(premise, conclusion): 仅当前提(premise)能推出结论(conclusion)时才返回True。提示:findModel在这里很有帮助;可以尝试反证法。plTrueInverse(assignments, inverse_statement): 仅当给定赋值时,(notinverse_statement) 为真时,才返回 True。
要测试和调试代码,请运行:
python autograder.py -q q1
测试某一个小点可以运行:
python autograder.py -t test_cases/q1/correctSentence1
Q2: Logic Workout
请在 logicPlan.py 文件中实现以下三个函数(记住尽可能使用 conjoin 和 disjoin):
-
atLeastOne(literals): 返回一个 CNF(合取范式)中的单一表达式(Expr),该表达式仅在输入列表中的至少一个表达式为真时为真。每个输入表达式都是一个文字。 -
atMostOne(literals): 返回一个 CNF 中的单一表达式(Expr),该表达式仅在输入列表中的最多一个表达式为真时为真。提示:使用itertools.combinations。如果你有n个文字,并且最多一个为真,那么生成的 CNF 表达式应该是\binom{n}{2}个子句的合取。 -
exactlyOne(literals): 使用atLeastOne和atMostOne返回一个 CNF 中的单一表达式(Expr),该表达式仅在输入列表中的恰好一个表达式为真时为真。每个输入表达式都是一个文字。
每个方法都接收一个 Expr 文字的列表,并返回一个单一的 Expr 表达式,该表达式表示输入列表中表达式之间的适当逻辑关系。附加要求是,返回的 Expr 必须是 CNF(合取范式)。在方法实现中,你不能使用 to_cnf 函数(或任何辅助函数 logic.eliminate_implications、logic.move_not_inwards 和 logic.distribute_and_over_or)。
在后续问题中实现你的计划代理(planning agents)时,不要对你的 planning agents 运行 to_cnf。这是因为 to_cnf 有时会使你的逻辑表达式变得更长,因此你要尽量减少这种效果;findModel 会在需要时执行此操作。在后续问题中,重用你对 atLeastOne(.)、atMostOne(.) 和 exactlyOne(.) 的实现,而不是从头重新设计这些函数。这样可以避免意外地创建非 CNF 基础的实现,导致速度极慢。
你可以使用 logic.pl_true 函数来测试你的表达式输出。pl_true 接收一个表达式和一个模型,并仅在表达式在给定模型下为真时返回 True。
要测试和调试你的代码,请运行:
python autograder.py -q q2
Q3: Pacphysics and Satisfiability
在这个问题中,你将实现基本的 Pacphysics 逻辑表达式,并通过构建适当的逻辑表达式知识库(KB)来证明 Pacman 应该和不该存在的位置。
在 logicPlan.py 中实现以下函数:
-
pacmanSuccessorAxiomSingle:生成一个表达式,定义 Pacman 在时间t位于(x, y)的充分且必要条件:- 阅读提供的可能原因 (
possible_causes) 的构造。 - 你需要填写返回语句,它将是一个
Expr。确保在适当的地方使用disjoin和conjoin。查看SLAMSuccessorAxiomSingle可能会有帮助,尽管那里的规则比这个函数更复杂。双向条件的较简单一方应该在左边以便于自动评分器使用。
- 阅读提供的可能原因 (
-
pacphysicsAxioms:生成一堆物理公理。对于时间 $t$:- 参数:
- 必需的:
t: 时间。all_coords和non_outer_wall_coords:(x, y)元组的列表。
- 可能为空:你将使用这些来调用函数。
walls_grid: 仅传递给successorAxioms,描述(已知的)墙。sensorModel(t: int, non_outer_wall_coords) -> Expr返回一个描述观测规则的单一Expr;你可以查看sensorAxioms和SLAMSensorAxioms以了解示例。successorAxioms(t: int, walls_grid, non_outer_wall_coords) -> Expr描述过渡规则,例如 Pacman 的先前位置和动作如何影响当前的位置;我们在pacmanSuccessorAxiomSingle中见过这个。
- 必需的:
- 算法:
- 对于
all_coords中的所有 $(x, y)$,附加以下蕴涵(if-then 形式):如果(x, y)处有一堵墙,那么 Pacman 在t时间不在 $(x, y)$。 - 在时间 $t$,Pacman 恰好位于
non_outer_wall_coords的一个位置。 - 在时间 $t$,Pacman 恰好执行
DIRECTIONS中的一个动作。 - 传感器:附加上调用
sensorAxioms的结果。除了checkLocationSatisfiability之外的所有调用者都使用这个;如何处理不希望添加任何传感器公理的情况由你决定。 - 过渡:附加上调用
successorAxioms的结果。所有调用者都会使用这个。 - 将上述每个句子添加到
pacphysics_sentences。如返回语句所示,这些句子将被合取并返回。
- 对于
- 参数:
-
checkLocationSatisfiability:- 给定一个过渡
(x0_y0,action0,x1_y1),action1和一个问题(problem),编写一个函数返回一个包含两个模型的元组(model1,model2):- 在
model1中,给定x0_y0,action0,action1,Pacman 在t=1时位于 $(x1, y1)$。这个模型证明 Pacman 可能在那里。如果model1为 False,我们知道 Pacman 肯定不在那里。 - 在
model2中,给定x0_y0,action0,action1,Pacman 在t=1时不在 $(x1, y1)$。这个模型证明 Pacman 可能不在那里。如果model2为False,我们知道 Pacman 肯定在那里。
- 在
action1对确定 Pacman 是否在位置上没有影响;它只是在使你的解决方案与自动评分器解决方案匹配。- 要实现这个问题,你需要向你的 KB 添加以下表达式:
- 向 KB 添加:
pacphysics_axioms(...),以及适当的时间。没有sensorModel,因为我们知道吃豆人世界上的一切。需要时,使用allLegalSuccessorAxioms进行过渡,因为这是针对常规 Pacman 过渡规则。 - 向 KB 添加:Pacman 的当前位置
(x0, y0) - 向 KB 添加:Pacman 执行
action0 - 向 KB 添加:Pacman 执行
action1 - 使用
findModel对上述两个模型进行查询。查询应该是不同的;关于如何进行查询,请参见entails。
- 向 KB 添加:
- 给定一个过渡
提醒:表示 Pacman 在时间 t 位于 (x, y) 的变量是 PropSymbolExpr(pacman_str, x, y, time=t),表示 (x, y) 处有墙的是 PropSymbolExpr(wall_str, x, y),表示在 t 时间执行动作 action 的是 PropSymbolExpr(action, time=t)。
要测试和调试你的代码,请运行:
python autograder.py -q q3
Q4: Path Planning with Logic
Pacman 正试图找到迷宫的终点(目标位置)。使用命题逻辑实现以下方法,为 Pacman 计划一系列行动,使其到达目标:
注意:从现在起,这些方法将会相当慢。这是因为SAT求解器非常通用,仅仅是处理逻辑,不像我们之前的算法那样使用针对特定问题的特定人类创建的算法。值得注意的是,pycosat 的实际算法是用 C 语言编写的,C 语言通常比 Python 快得多,即便如此,速度仍然很慢。
positionLogicPlan(problem):给定一个 logicPlan.PlanningProblem 的实例,返回 Pacman 执行的一系列动作字符串。
你不会实现搜索算法,而是创建代表所有可能位置在每个时间处的 pacphysics 的表达式。这意味着在每个时间,你应该为网格上的所有可能位置添加通用规则,这些规则不假设 Pacman 的当前位置。
你需要为知识库编写以下句子,形式如下:
-
添加到知识库:
- 初始知识:时间 0 时Pacman的初始位置。
-
循环(时间范围为 50,因为自动评分器不会测试需要 ≥50 时间的布局):
- 打印时间:查看代码运行情况以及运行到何处。
- 初始知识:时间
t时,Pacman 只能在non_wall_coords中的一个(exactlyOne)位置。这类似于pacphysicsAxioms,但不要使用该方法,因为在生成可能位置列表时我们使用的是non_wall_coords(稍后使用walls_grid)。 - 知识库中现有变量是否存在满足赋值?使用
findModel并传入目标断言和知识库。- 如果存在,使用
extractActionSequence从起点到目标返回一系列动作。 - 目标断言是在时间
t时 Pacman 位于目标的位置的表达式。
- 如果存在,使用
-
添加到知识库:
- Pacman 每个时间执行一个动作。
- 过渡模型句子:为
non_wall_coords中所有可能的 Pacman 位置调用pacmanSuccessorAxiomSingle(...)。
请注意,根据我们设置 Pacman 网格的方式,Pacman 可占据的最左下角的空间(假设那里没有墙)是 $(1,1)$,而不是 $(0,0)$,如下所示。
Pacphysics 在 Q3 和 Q4 中的总结(也见于AIMA第7.7章):
- 对于所有 $x, y, t$:如果
(x, y)处有墙,则Pacman在t时间不在 $(x, y)$。 - 对于每个 $t$:Pacman恰好在所有可能的
(x, y)位置之一。可以通过外部或所有墙的知识进行优化,按照每个函数的规范。 - 对于每个 $t$:Pacman恰好执行一个可能的动作。
- 对于每个 $t$(除
t = ??外):过渡模型:Pacman在t时间在(x, y)当且仅当他在t-1时间在(x-dx, y-dy)并在t-1时间执行了(dx, dy)动作。
在较小的迷宫上测试代码:
python pacman.py -l maze2x2 -p LogicAgent -a fn=plp
python pacman.py -l tinyMaze -p LogicAgent -a fn=plp
要测试和调试你的代码,请运行:
python autograder.py -q q4
调试提示:
- 如果你发现解决方案长度为 0 或 1:仅仅知道Pacman在给定时间的位置是否足够?是什么阻止他同时出现在其他地方?
- 作为理智检查,验证如果Pacman在时间
0在 $(1,1)$,并在时间6在 $(4,4)$,他在此期间从未在 $(5,5)$。 - 如果解决方案运行时间超过几分钟,你可能需要重新审视 exactlyOne 和 atMostOne 的实现,并确保使用尽可能少的子句。
Q5: Eating All the Food
Pacman 试图吃掉棋盘上的所有食物。使用命题逻辑实现以下方法,为 Pacman 计划一系列行动,使其达到目标。
foodLogicPlan(problem):给定一个 logicPlan.PlanningProblem 实例,返回 Pacman 执行的一系列动作字符串。
这个问题的总体格式与问题 4 相同;你可以从那里复制你的代码作为起点。问题 4 的注释和提示也适用于这个问题。你需要实现以前问题中未实现的所有必要的后继状态公理。
与前一问题的变化:
- 初始化
Food[x,y]_t变量,根据初始信息使用代码PropSymbolExpr(food_str, x, y, time=t),当且仅当t时间(x, y)处有食物时,每个变量为真。 - 改变目标断言:你的目标断言句子必须在且仅在所有食物都被吃掉时为真。当所有
Food[x,y]_t为假时发生。 - 添加食物后继公理:
Food[x,y]_t+1和Food[x,y]_t以及Pacman[x,y]_t之间的关系是什么?食物后继公理只应涉及这三个变量,对于任何给定的(x, y)和 $t$。考虑食物变量的过渡模型,并在每个时间步将这些句子添加到你的知识库中。
测试代码:
python pacman.py -l testSearch -p LogicAgent -a fn=flp,prob=FoodPlanningProblem
我们不会在需要超过 50 个时间的布局上测试你的代码。
测试和调试代码:
python autograder.py -q q5
其余项目的辅助函数
对于剩下的问题,我们将依赖以下辅助函数,这些函数将在定位、建图和SLAM的伪代码中引用。
将 pacphysics、动作和感知信息添加到 KB:
- 添加到 KB:
pacphysics_axioms(...)(你在Q3中编写的)。使用sensorAxioms和allLegalSuccessorAxioms进行定位和建图,只在 SLAM 中使用SLAMSensorAxioms和SLAMSuccessorAxioms。 - 添加到 KB:Pacman 采取由
agent.actions[t]规定的动作。 - 通过调用
agent.getPercepts()获取感知并将感知传递给fourBitPerceptRules(...)以进行定位和建图,或传递给numAdjWallsPerceptRules(...)以进行SLAM。将生成的percept_rules添加到 KB。
使用更新的 KB 查找可能的 Pacman 位置:
possible_locations = []- 遍历
non_outer_wall_coords。- 我们能否证明 Pacman 在
(x, y)处?我们能否证明 Pacman 不在(x, y)处?使用entails和 KB。 - 如果存在满足赋值的情况,在时间
tPacman 在 $(x, y)$,则将(x, y)添加到possible_locations。 - 添加到 KB:在时间
tPacman 明确在的位置 $(x, y)$。 - 添加到 KB:在时间
tPacman 明确不在的位置 $(x, y)$。 - 提示:检查
entails的结果是否相互矛盾(即 KBentails A和entails ¬A)。如果是,打印反馈以帮助调试。
- 我们能否证明 Pacman 在
使用更新的 KB 查找可证明的墙位置:
-
遍历
non_outer_wall_coords。- 我们能否证明
(x, y)处有墙?我们能否证明(x, y)处没有墙?使用entails和 KB。 - 添加到 KB 并更新
known_map:明确有墙的位置 $(x, y)$。 - 添加到 KB 并更新
known_map:明确没有墙的位置 $(x, y)$。 - 提示:检查
entails的结果是否相互矛盾(即 KBentails A和entails ¬A)。如果是,打印反馈以帮助调试。
观察:我们将已知的 Pacman 位置和墙添加到 KB,以便在后续时间步中不必重新查找这些内容;从技术上讲,这是冗余信息,因为我们首先使用 KB 证明了这一点。
- 我们能否证明
Q6: Localization
Pacman 从已知地图开始,但起始位置未知。它有一个 4-bit 的传感器,返回其在北、南、东、西方向上是否有墙。例如,1001 表示 Pacman 的北和西方向有墙,这 4 位用有 4 个布尔值的列表表示。通过记录这些传感器读数以及每个时间采取的动作,Pacman能够确定其位置。你需要编写帮助 Pacman 确定每个时间可能位置的句子,通过实现:
localization(problem, agent):给 定 logicPlan.LocalizationProblem 的一个实例和 logicAgents.LocalizationLogicAgent 的一个实例,在时间 0 到 agent.num_steps-1 之间重复生成在时间 t 可能的位置列表 $(x_i, y_i)$:[ (x_0_0, y_0_0), (x_1_0, y_1_0), ...]。注意,你不需要担心生成器的工作方式,因为这行代码已经为你写好了。
为了让 Pacman 在定位过程中使用传感器信息,你将使用已经为你实现的两个方法。sensorAxioms, 即 Blocked[Direction]_t \leftrightarrow [(P[x_i,y_j]_t\wedge WALL[x_i+dx,y_j+dy])\vee (P[x_i',y_j']_t\wedge WALL[x_i'+dx,y_j'+dy])...] 和 fourBitPerceptRules,它们将时间t的感知转换为逻辑句子。
请按照我们的伪代码实现该函数:
- 添加到知识库:墙所在的位置(walls_list)和不在的位置(not in walls_list)。
- 对于在
range(agent.num_timesteps)中的 $t$:- 添加 pacphysics、动作和感知信息到知识库。
- 使用更新的知识库查找可能的 Pacman 位置。
- 在时间
t上调用agent.moveToNextState(action_t)。 - 生成(
yield)可能的位置。
关于显示:黄色的 Pacman 是在当前的时间的位置,白色的是由已知的墙和自由空间等计算的上一个时间的可能的位置。
测试和调试代码:
python autograder.py -q q6
Q7: Mapping
Pacman 现在知道了他的起始位置,但不知道墙的位置(除了外部坐标的边界是墙)。与定位类似,它有一个4位的传感器,返回其在北、南、东、西方向上是否有墙。你将编写帮助Pacman确定墙位置的句子,通过实现:
mapping(problem, agent):给定一个 logicPlan.MappingProblem 的实例和一个 logicAgents.MappingLogicAgent 的实例,在时间 0 到 agent.num_steps-1 之间重复生成关于地图的信息 [[1, 1, 1, 1], [1, -1, 0, 0], ...]。注意,你不需要担心生成器的工作方式,这行代码已经为你写好了。
known_map:
known_map是一个大小为(problem.getWidth()+2, problem.getHeight()+2)的二维数组(列表的列表),因为地图周围有墙。- 如果
(x, y)在时间t保证是墙,则known_map的每个条目为1;如果保证不是墙则为0;如果(x, y)在时间t仍然不明确,则为-1。 - 当无法证明
(x, y)是墙,也无法证明(x, y)不是墙时,结果是不明确的。
请按照我们的伪代码实现该函数:
- 获取 Pacman 的初始位置
(pac_x_0, pac_y_0),并将其添加到知识库中。同时添加该位置是否有墙。 - 对于
t在range(agent.num_timesteps)中:- 添加 pacphysics、动作和感知信息到知识库。
- 使用更新的知识库查找可证明的墙位置。
- 在时间
t上调用agent.moveToNextState(action_t)。 - 生成
known_map。
测试和调试代码:
python autograder.py -q q7
有时,Pacman 在迷失和黑暗中徘徊。
在 SLAM(同时定位与建图)中,Pacman 知道他的初始坐标,但不知道墙的位置。在 SLAM 中,Pacman 可能会无意中采取非法动作(例如,当北面有墙阻挡时向北走),这会增加 Pacman 随时间的不确定性。此外,在我们的 SLAM 设置中,Pacman 不再有一个4位的传感器来告诉我们四个方向是否有墙,而是只有一个 3-bit 的传感器,揭示他附近有多少墙。这有点像 WiFi 信号强度条;000 表示没有邻近的墙,100 表示恰好有1面墙相邻,110 表示恰好有2面墙相邻,111 表示恰好有3面墙相邻。这 3 位由 3 个布尔值的列表表示。因此,你将使用 SLAMSensorAxioms 和 numAdjWallsPerceptRules,而不是 sensorAxioms 和 fourBitPerceptRules。你将编写帮助 Pacman 确定以下内容的句子:(1)每个时间的可能位置,(2)墙的位置,具体实现方法如下:
slam(problem, agent):给定一个 logicPlan.SLAMProblem 和 logicAgents.SLAMLogicAgent 的实例,重复生成一个包含两个项目的元组:
- 时间
t的known_map(格式与问题6中的 mapping 相同) - 时间
t的 Pacman 可能位置的列表(格式与问题5中的 localization 相同)
为了通过自动评分器,请按照我们的伪代码实现该函数:
- 获取 Pacman 的初始位置
(pac_x_0, pac_y_0),并将其添加到知识库(KB)中。相应更新known_map并将适当的表达式添加到知识库。 - 对于
t在range(agent.num_timesteps)中:- 添加 pacphysics、动作和感知信息到知识库。使用
SLAMSensorAxioms、SLAMSuccessorAxioms和numAdjWallsPerceptRules。 - 使用更新的知识库查找可证明的墙位置。
- 使用更新的知识库查找可能的 Pacman 位置。
- 在时间
t上调用agent.moveToNextState(action_t)。 - 生成
known_map和possible_locations。
- 添加 pacphysics、动作和感知信息到知识库。使用
测试和调试代码(注意:这可能很慢):
python autograder.py -q q8